Table of Contents
Types Of Industrial Robots -Robot Classification
Robot Classification
Robots are being classified on the basis of their physical configuration and control systems adopted. These classifications are briefly described as follows :
1.Classification on the Basis of Physical Configurations
On the basis of physical configuration industrial robots are classified in four different types. They are :
(i) cartesian configuration,
(ii) cylindrical configuration,
(iii) polar configuration, and
(iv) jointed-arm configuration.
Cartesian Configuration
Robots having cartesian configurations consist of links connected by linear joints (L). As the configuration has three perpendicular slides, they are also called rectilinear robots. Robot having a similar configuration is known as Gantry Robots. Its structure resembles a gantry-type crane.
Cylindrical Configuration
In the cylindrical configuration, robots have one rotatory (R) joint at the base and linear (L) joints succeed to connect the links. The space in which this robot operates is cylindrical in shape, hence the name cylindrical configuration.
Polar Configuration
Polar robots have a work space of spherical shape. In general, the arm is linked to the base with a twisting (T) joint and rotatory (R) and or linear (L) joints. The designation of the arm for this arm can be TRL or TRR. Robots with the description of TRL are also called spherical robots. Those having the designation of TRR are called as articulated robots. It resembles a human arm in terms of configuration.
Jointed-Arm Configuration
The combination of cylindrical and articulated configurations is known as jointed-arm configuration. The arm of the robot is connected to the base with a twisting joint. Rotatory joints are used to connect the links in the arm. Generally, the rotation takes place in the vertical plane. Popular robot falling under this category is called SCARA (Selective Compliance Assembly Robot Arm). It is basically used for the assembly purpose.

Read More : Major Components of Robots – Parts Of Robots![]()
2. Classification based on Control Systems
On the basis of the control systems adopted, robots are classified into the following categories :
(i) Point-to-point (PTP) control robot
(ii) Continuous-path (CP) control robot
(iii) Controlled-path robot
Point-to-Point (PTP) Control Robot
The PTP robot is capable of moving from one point to the other point. The locations are recorded in the control memory. The paths are not controlled by the path guide. Instead the desired path is traced by programming a series of points. Component insertion, spot welding, hole drilling, machine loading, unloading and crude assembly are some of the common applications of this type of robot.
Continuous-Path (CP) Control Point
The movement along the controlled path is performed by the CP robot. Along the controlled path, with CP control, the robot can stop any specified point. In the robot’s control memory, all the points must be stored explicitly. Straight-line motion is being carried out by these types of robots. Some continuous-path controlled robots also have the capability to follow a smooth curve path that has been defined by the programmer. Here, the programmer manually moves the robot arm through the desired path and the controller unit stores a large number of individual point locations along the path in memory.
Controlled-Path Robot
In controlled-path robots, the control equipment can develop paths of different geometry such as straight lines, circles, and interpolated curves with a high degree of accuracy. Good accuracy can be obtained at any point along the specified path. Only the start and finish points and the path definition function must be stored in the robot’s control memory. It is important to mention that all controlled-path robots have a servo capability to correct their path.
More Resources /articles
Robotics and Automation - Notes , articles , Interview Que & Ans
Manufacturing Technology Notes , Articles
Mechanical Subjectwise Basic Concept Notes ,Articles
Robotic and automation projects List - Abstract , Report
New Mechanical Projects 2020 ( All Projects Post Index List )
Related posts:
 Types Of Industrial Robots- Industrial robot applications
Types Of Industrial Robots- Industrial robot applications  Cylindrical Robot : Diagram , Construction , Applications
Cylindrical Robot : Diagram , Construction , Applications  Robotics | Introduction and classification of robotics
Robotics | Introduction and classification of robotics 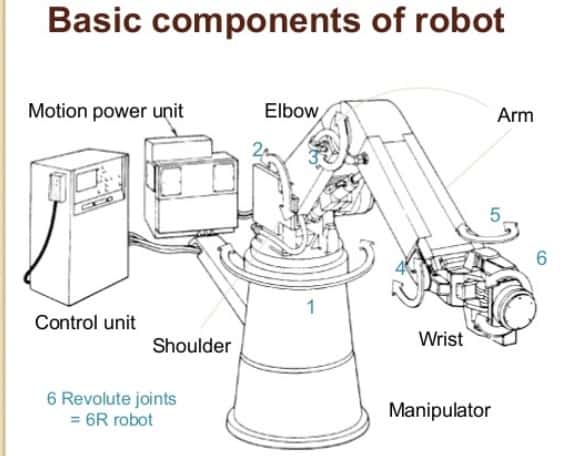 Major Components of Robots – Parts Of Robots
Major Components of Robots – Parts Of Robots  Basic Concepts | Robotic and Automation | Questions Answer For Interview
Basic Concepts | Robotic and Automation | Questions Answer For Interview  Artificially Intelligent Robots used in Industrial Automation
Artificially Intelligent Robots used in Industrial Automation  Grippers in Robotics – Types of Grippers used in industrial applications
Grippers in Robotics – Types of Grippers used in industrial applications  Seminar on Agricultural Robots Report Pdf Free Download
Seminar on Agricultural Robots Report Pdf Free DownloadRecent Posts
AI in AutoCAD and SolidWorks: Complete Guide for Mechanical Engineers (2026)
Artificial Intelligence (AI) is revolutionizing almost every engineering industry, and Computer-Aided Design (CAD) software is no exception. Mechanical engineers, product designers, architects, and...
Aluminium Alloys: Types, Composition, Properties, Heat Treatment & Applications
Introduction Aluminium is one of the most widely used engineering materials because of its lightweight, corrosion resistance, excellent thermal conductivity, and good machinability....