Major Components of Robots – Parts Of Robots
The structure of a robot is usually mostly mechanical and is called a kinematic chain (its functionally similar to the skeleton of human body). The chain is formed of links (its bones), actuators (its muscles) and joints which can allow one or more degrees of freedom.
Some robots use open serial chains in which each link connects the one before to the one after it. Robots used as manipulators have an end effectors mounted on the last link. This end effectors can be anything from a welding device to a mechanical hand used to manipulate the environment.
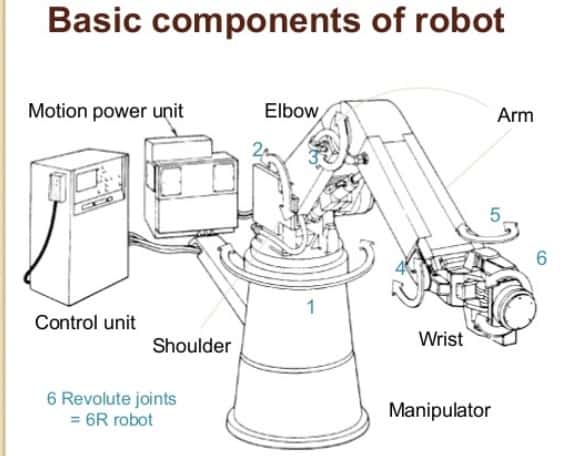
Major Components of Robots
1. Actuation:
Actuation is the “muscles” of a robot, the parts which convert stored energy into movement. The most popular actuators are electric motors.
2. Motors:
The vast majority of robots use electric motors, including bushed and brushies DC motors.
3. Stepper motors:
Stepper motors do not spin freely like DC motors; they rotate in discrete steps, under the command of a controller. This makes them easier to control.
4. Piezo Motors:
A recent alternative to DC Motors are piezo motors or ultrasonic motors. Tiny piezoceramic elements, vibrating many thousands of times per second, cause linear or rotary motion.
5. Air Muscles:
The air muscle in a simple yet powerful device for providing a pulling force. It behaves in a very similar way to a biological muscle; it can be used to construct robots with a similar muscle/skeleton system to an animal.
6. Electroactive polymers:
Are classes of plastics which change shape in response to electric stimulation.
7. Elastic Nanotubes:
The absence of defects in nanotubes enables these filaments to deform elastically by several percent.
8. Manipulation:
Robots work in the real world require some way to manipulate objects; pick up, modify, destroy or otherwise have an effect. Thus, the hands, of a robot are often referred to as end effectors. Most robots arms are replaceable effectors, each allowing them to perform some small range of tasks. Some have a fixed manipulator which cannot be replaced, while a few have one very general purpose manipulator.
Related posts:
 Types Of Industrial Robots -Robot Classification
Types Of Industrial Robots -Robot Classification  Fabrication of Kinematic Legged Robots – Mechanical Project
Fabrication of Kinematic Legged Robots – Mechanical Project  Major Parts of mechanical press and its Function
Major Parts of mechanical press and its Function  Grippers in Robotics – Types of Grippers used in industrial applications
Grippers in Robotics – Types of Grippers used in industrial applications  Seminar on Agricultural Robots Report Pdf Free Download
Seminar on Agricultural Robots Report Pdf Free Download  Types Of Industrial Robots- Industrial robot applications
Types Of Industrial Robots- Industrial robot applications  Basic Concepts | Robotic and Automation | Questions Answer For Interview
Basic Concepts | Robotic and Automation | Questions Answer For Interview  Artificially Intelligent Robots used in Industrial Automation
Artificially Intelligent Robots used in Industrial AutomationRecent Posts
Mechanical Engineering is an essential discipline of engineering encompassing many specializations, with each contributing its unique aspect to the dynamic and inventive nature of this field. With...
The Ram Lalla idol, which is installed at Ayodhya's Ram temple has many significant religious symbols from Hinduism. All 10 incarnations of Lord Vishnu are engraved on the idol. Notably, Lord Ram is...