Table of Contents
Unmanned Terrain with Rocker Bogie Suspension- Mechanical Project
Abstract:
A rover is a vehicle for driving over rough terrain, especially one driven by remote control over extraterrestrial terrain. Robotic rovers are used extensively for exploratory and reconnaissance purposes in the fields of scientific exploration and defense. This project focuses on the design and development of a rover with autonomous driving and environmental sensing capability. It can be used as an exploratory rover, providing information about the terrain and surrounding atmosphere. It can also be used as a surveillance robot to alert people in areas with security threats like national borders, terrorist occupied
territories etc., where it is difficult for humans to work. The rover will be having a Rocker Bogie Suspension system with 6 wheels for greater stability in maneuvering over obstacles. It can avoid un-mountable obstacles and can traverse over mountable obstacles. Instructions are sent to the rover by a remote computer connected over Wi-Fi. The rover is equipped to send a live video feed and sensor data to the remote computer.
INTRODUCTION
Robotic rovers and other remotely operated vehicles (ROVs) are an application of Tele robotics. Tele robotics is the area of robotics concerned with the control of semi-autonomous robots from a distance, chiefly using Wireless network (like Wi-Fi, Bluetooth, the Deep Space Network, and similar) or tethered connections. It is a combination of two major subfields, tele-operation and telepresence. Rovers were used and are extensively being used for planetary exploration and military operations. They create an opportunity to make scientific experiments at places where it is impossible for humans to explore.
The Rocker Bogie Suspension
The Rocker-Bogie system has been the suspension arrangement used in the Mars rovers. It is currently NASA’s favored design. The term “rocker” comes from the rocking aspect of the larger links on each side of the suspension system. These rockers are connected to each other and the vehicle chassis through a differential. Relative to the chassis, when one rocker goes up, the other goes down.
The chassis maintains the average pitch angle of both rockers. One end of a rocker is fitted with a drive wheel and the other end is pivoted to a bogie. The term “bogie” refers to the links that have a drive wheel at each end. Robots using rocker bogie mechanism makes use of a suspension mechanism that consists of several rigid elements connected through joints of a certain number of degrees of freedom (DOF) resulting in a structure that has one system DOF. This enables them to move along uneven terrain without losing contact with the ground. The suspension has 6 wheels with symmetric structure for both sides. Each side has 3 wheels which are connected to each other two with links. The main linkage called rocker has 2 joints while first joint is connected to front wheel, the other joint is assembled to another linkage called bogie, which is similar to train wagon suspension member.
Read More : Fabrication of Kinematic Legged Robots- Mechanical Project

Construction
1) Mechanical Components: CPVC Pipes
Nylon (Polyamide)
Ball Bearings
Nuts and Bolts
Wheels
2) Electronic Components: Raspberry Pi
Arduino Uno
ATmega 328
DC MOTORS
L298N MOTOR DRIVERS
ULTRASONIC SENSOR
BAROMETRIC PRESSURE SENSOR (BMP 180)
Webcam
APPLICATIONS AND SCOPE
Applications
The project focuses on developing a platform which can be used for many applications. The rover can travel in uneven terrain autonomously with the help of the rocker bogie suspension system and the sensor values obtained from the rover help in evaluating the atmospheric conditions present around the rover. It can be used for exploration in places which require continuous environmental and video surveillance. Reconnaissance is one of the major applications of such rovers. It can also be used for geological mapping of unknown terrain as it can even provide live video feed and images of the terrain being explored. Information about the terrain and the climate around it can be studied and recorded for mapping.
Future Scope
One of the main problems of this rover is the limitation offered by the battery power and the communication range. When these limitations are answered by using solar panels to charge the battery and mobile data cards for internet connectivity, the rover can be made operational in real time and can be left in a remote terrain for continuous operation. With higher computing electronics, a higher level of autonomy can be given to the rover in navigation by using GPS modules and path planning algorithms. Devices and subsystems like autonomous robotic arm, stereo camera and various useful sensors can also be attached to the rover to further enhance its functionality.
AUTHOR PROFILE
Aditya Vangara is a student from Mahatma Gandhi Institute of Technology pursuing B.TECH in the field of Mechatronics.
Download and Reference :
https://www.ijraset.com/fileserve.php?FID=3306![]()
Related posts:
 Path Planning Automated Guided Robot | Mechanical Project
Path Planning Automated Guided Robot | Mechanical Project  Robotics and Automation Online Notes , Objective and Interview Questions
Robotics and Automation Online Notes , Objective and Interview Questions 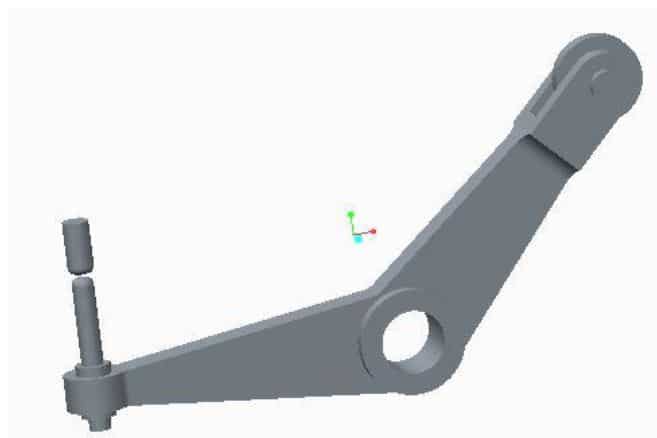 Design and Analysis of Rocker Arm Project report Download
Design and Analysis of Rocker Arm Project report Download  Compressed Air Production Using Vehicle Suspension-Mechanical Project
Compressed Air Production Using Vehicle Suspension-Mechanical Project  AUTOMATIC SCRAP COLLECTING VEHICLE PROJECT
AUTOMATIC SCRAP COLLECTING VEHICLE PROJECT  Autonomous Robotic Wheelchair Report Download Mechanical projects
Autonomous Robotic Wheelchair Report Download Mechanical projects  ROBOTIC VACUUM CLEANER- Mechanical Project
ROBOTIC VACUUM CLEANER- Mechanical ProjectRecent Posts
Mechanical Engineering is an essential discipline of engineering encompassing many specializations, with each contributing its unique aspect to the dynamic and inventive nature of this field. With...
The Ram Lalla idol, which is installed at Ayodhya's Ram temple has many significant religious symbols from Hinduism. All 10 incarnations of Lord Vishnu are engraved on the idol. Notably, Lord Ram is...